What is DBR?
Dynamic Braking Resistor (DBR) is utilized as a braking system in railway industry, traction motors, heavy mining machines, cranes, conveyors, elevators, etc. DBR brings about loss of kinetic inertia and rapid engine stop.
When DC motors have stopped, these motors are disconnected from the power supply and enter the generating range due to kinetic inertia. At this time, the dynamic brake resistor as a load has connected to both ends of the DC motor and the energy produced is wasted as heat and the motor stops quickly. In AC motors, by disconnecting the stator from the power supply, there is still high inertia in the load and the rotor, the motor enters into the generator mode (Regeneration) and by consuming the produced energy, stops. Besides, the DBR resistor prevents overvoltage caused by the generator mode on the inverter.
Main Specification of DBR
Generally, the main specification of DBR are rated power, rated voltage and rated resistance. Since in the Braking systems, the load on the system is not constant, in order to simplify the calculations, the concepts of “Duty Cycle” and “Power Peak” are used. In NEMA standard, considering the type of implementation and experimental tests, proper values are proposed for the above-mentioned two concepts. In addition to Power Peak and Duty Cycle, selection of ohmic value of DBR is dependent on the specification of its relevant motor.
PAARSUN Company designs and implements DBRs by considering the mentioned parameters and also increasing the allowable temperature of the element according to the standard, type of cooling, device weight and system needs
Main advantages of utilizing DBR
- Quick stop of AC and DC motors
- Prevent temperature rise at the moment of motor braking
- Maintain the voltage in the operating range of the motor and prevent inverter overvoltage trip
- Reduce the risk of mechanical braking failure due to temperature rise
- Reduce damages to the parts involved with mechanical braking system
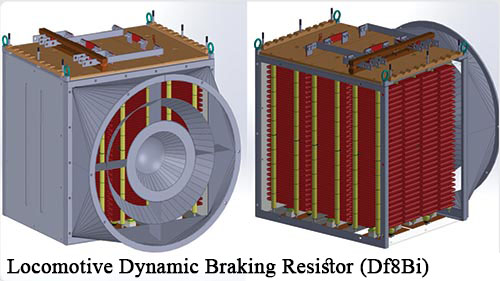
GT26 Locomotive DBR
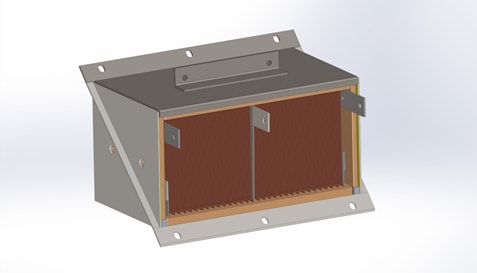
ER24PC Locomotive DBR

Alstom Locomotive DBR
